|
電網畸變條件下有源電力濾波器控制技術研究
張桂紅 (武漢交通職業學院,武漢430065)
摘 要:基于電網畸變條件下傳統控制方案造成有源電力濾波器諧波補償效果不佳的問題,提出了一種改進的控制方案,該方案主要由改進同步鎖相環(SRF-PLL)、改進諧波檢測方法和自適應諧振電流控制器組成。改進的同步鎖相環(SRF-PLL)利用滑動平均濾波器準確提取畸變電網電壓基波正序分量,實現了SRF-PLL無靜差、高精度的跟蹤電網相位;改進的檢測諧波方法采用滑動平均濾波器代替低通濾波器進行直流量提取,克服了傳統檢測法因低通濾波器導致實時動態性不強的缺陷;采用PI+V PI(矢量比例積分)電流控制方案,實現了有源電力濾波器在電網畸變條件下優異的電流控制性能,建立了一個5kVA三相有源電力濾波器實驗平臺,驗證了本文提出控制策略的優越性。 關鍵詞:有源電力濾波器;滑動平均濾波器(MAF);同步鎖相環;諧波檢測;諧振控制
0 引言
大量非線性負載接人電網會造成電能質量污染,諸如系統效率不高、功率因數低、電壓、電流的諧波大等,影響到電網的正常運行,目前主要采用有源電力濾波器來補償電網的諧波和無功功率。 目前對有源電力濾波器(active power, APF)的控制研究大都基于電網理想條件下進行開展的,在實際中,電網存在相位不平衡、電壓諧波、頻率偏差等現象,這都會影響APF的性能,因此,有必要開展電網畸變條件下的有源電力濾波器控制研究。有源電力濾波器的原理是根據鎖相環測量的電網電壓相位,利用測量算法獲得電網電流,獲得需要補償的電流參考值,然后利用電流控制策略生成控制信號控制有源電力濾波器進行諧波補償。因此,有源電力濾波器的性能主要取決于三個方面,一是準確檢測非理想電網的頻率和相位,保證后續運算和補償的相位準確性;二是準確檢測電網電流,準確生成需要補償的電流參考值;三是采取先進的控制算法,使得實際補償電流準確跟蹤補償電流參考值。 在電網的頻率和相位檢測方面,同步旋轉鎖相環(SRF-PLL)檢測電網的頻率和相位時魯棒性較好,但是在電網電壓諧波較大、相位不平衡和頻率脈動的條件下,這種方法抵抗干擾的性能較差。在諧波檢測方面,傳統基于瞬時無功功率原理的ip-iq,檢測法在低通濾波器存在,導致補償的實時性、動態性不強,諧波檢測與補償精度不夠。在電流控制算法方面,不僅要考慮電網畸變對有源電力濾波器電流補償的影響,還需要考慮對同步鎖相環(SRF-PLL)的影響。 本文提出了一種電網畸變條件下的有源電力濾波器控制結構,基于滑動平均濾波器的改進SRF-PLL,有效降低在電網畸變條件下對電網頻率和相位的鎖相誤差,基于滑動濾波器的在線諧波檢測方法,去除低通濾波器,克服了ip-iq檢測法中由于低通濾波器特性導致的動態性能不強和檢測精度不好的問題,具有較好的動態性能和檢測精度,采用了PI+VPI頻率自適應選擇性諧波電流控制策略,能夠在電網非理想條件下保持較好性能,最后,搭建了5kVA三相電壓型APF來對提出的控制策略進行了實驗驗證。 1 改進的同步鎖相環SRF-PLL研究
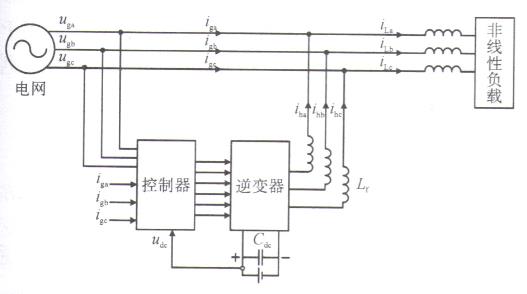
根據電氣系統的實際應用需求,有源電力濾波器的拓撲結構分為:串聯型、并聯型、串并聯相結合3種類型,這3種類型也可以和無源濾波器相結合形成混合式濾波器,本文研究的APF采用并聯型結構,其拓撲結構如圖1所示。
圖1 并聯型有源電力濾波器結構圖
1.1 電網畸變時對SRF-PLL的影響
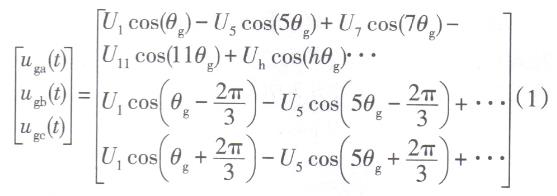
三相無中線電網中,偶次諧波、3次及其倍數次諧波分量為零,因此,電網畸變條件下的電網電壓可以表示為
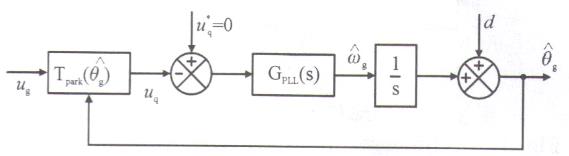
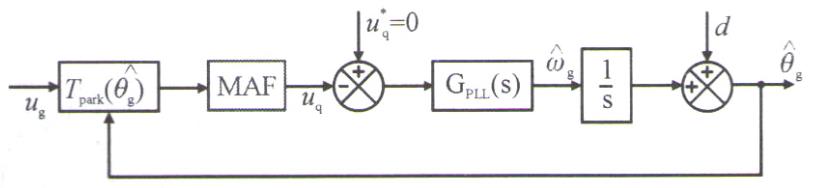
式中:θg為電網相位;U1為基波分量峰值;Uh為h次諧波分量峰值,其中h = 6n±1,n = 1,2,3…。 SRF-PLL鎖相環的原理如圖2所示,其中d為擾動信號,GPLL(s)為PI控制器。
圖2 SRF-PLL控制原理圖
SRF-PLL鎖相環主要原理:將電網電壓從三相abc靜止坐標系變換到兩相dq同步旋轉坐標系,通過閉環控制調節q軸電壓為零,就可以檢測電網的相位和頻率。 根據圖2可知,式(1)中三相電壓經過Park變 換后為
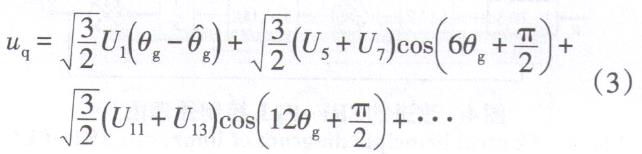
式(2)中,θg為圖2鎖相環輸出的電網相位,那么q軸電壓為
SRF-PLL閉環控制令uq=1,那么根據式⑶可以求得電網相位的估計值為
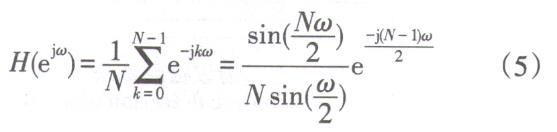
從式(3)可以看出,經過變換,三相靜止坐相旋轉坐標系中變為;h=6n次諧波,該諧波將導致式(4)檢測的電網相位與實 際電網相位之間出現誤差。 1.2 基于滑動平均濾波器的改進SRF-PLLN階滑動平均濾波器(moving average filter,MAF)頻率響應為
式中:ω=2πfTs=2πf/fs, fs=1/Ts, fs為采樣頻率;Ts為采樣周期。
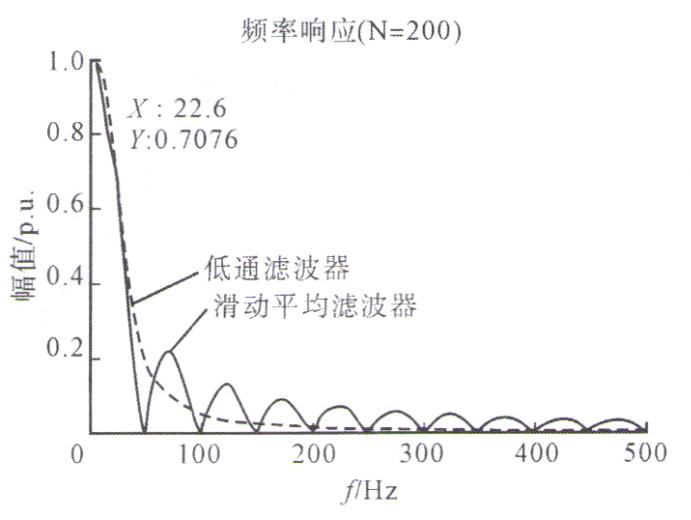
設fs=10 kHz, N=200,求得MAF截止頻率為f=22.60 Hz,設計截止頻率為22.60 Hz低通濾波器,二者的幅頻特性對比如圖3所示。
圖3 MAF和低通濾波器幅頻響應對比
從前面分析可知,三相靜止坐標系下h=6n±1次諧波在兩相旋轉坐標系中變為h=6n次諧波。由圖3可見,MAF在基波整數倍處增益為零,也就是說,對基波整數倍諧波具有非常強的衰減能力,當電網畸變造成諧波過大時,MAF能夠精確地提取基波分量。 因此,改進后的SRF-PLL控制原理圖如圖4所示,與圖2傳統SRF-PLL相比,增加了滑動濾波器來消除非基波分量的諧波,從而使得式(4)的檢測結果θg≈θg。
圖4 改進的SRF-PLL控制原理圖 2 改進的諧波檢測方法研究
2.1 傳統諧波檢測方法
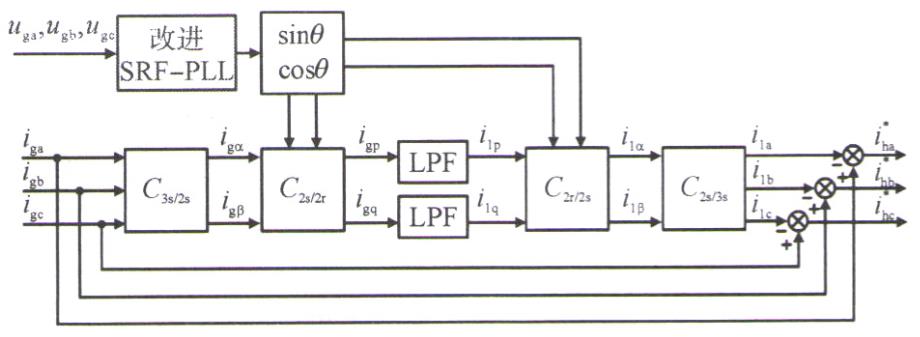
傳統采用瞬時無功功率理論的ip-iq諧波檢測方法如圖5所示,該檢測方法中用到了低通濾波器,低通濾波器決定了該諧波檢測方法的檢測精度和動態性能都會受到影響,獲得優異動態性能,就需犧牲檢測精度為代價,反之亦然。
圖5 諧波檢測算法 2.2 新型諧波檢測方法
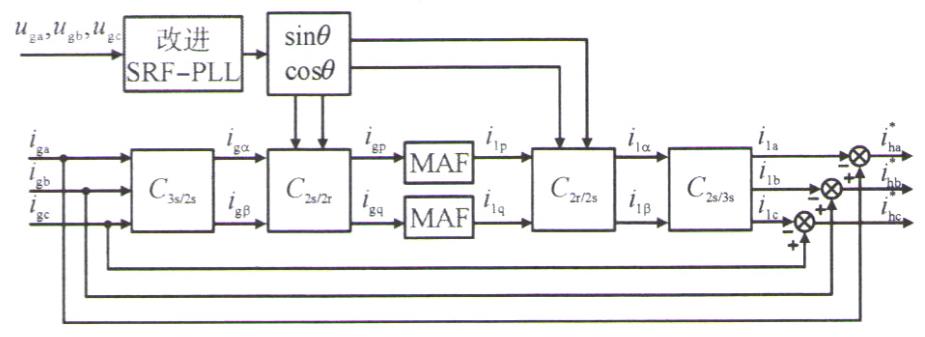
基于瞬時無功功率理論的諧波檢測方法不能兼顧動態特性和檢測精度。實際上,電網電流包含基波和諧波成分,經過Park變換后,只有基波變成了直流量ip、iq,其他成分均為交流量,而一個周期內交流分量的平均值為零,因此,同樣可以采取1.2節中的滑動平均濾波器代替圖5傳統檢測方法中的低通濾波器來求直流分量i1p、i1q,新型諧波檢測方法如圖6所示。
圖6 改進的諧波檢測算法
從圖3可以看出滑動平均濾波本質上為一個低通濾波器,在低頻域,與低通濾波器相同,在高頻域,其幅頻特性以工頻為周期波動,且在工頻的整數倍處增益為0,從而能夠很好地濾除基波整數倍的諧波,獲得精確直流分量,提高了諧波豐喉的精度。 3 PI-VPI電流控制方案研究
從前文的分析可知,三相無中線電網在畸變條件下,電網電流在三相靜止坐標系下含有h=6n±1次諧波,變換到兩相旋轉坐標系中為h=6n次諧波,那么就需要控制補償電流無靜差跟蹤指令電流,目前在高次諧波控制方面比例諧振控制器應用比較廣泛,但是存在控制頻帶過窄,動態響應不佳的缺 點,尤其在電網畸變條件下可能導致APF無法正確補償,甚至注人不正確的電流會進一步導致電網畸變。 本文采用了一種PI-VH電流控制方案,使得APF在電網畸變情況下能夠保持優良的性能,控制系統由電壓外環與電流內環組成,電壓外環采用PI控制保證直流電壓穩定,電流內環采用PI-VPI控制保證補償電流無靜差跟蹤補償電流指令值。PI-VPI電流控制器的傳遞函數為
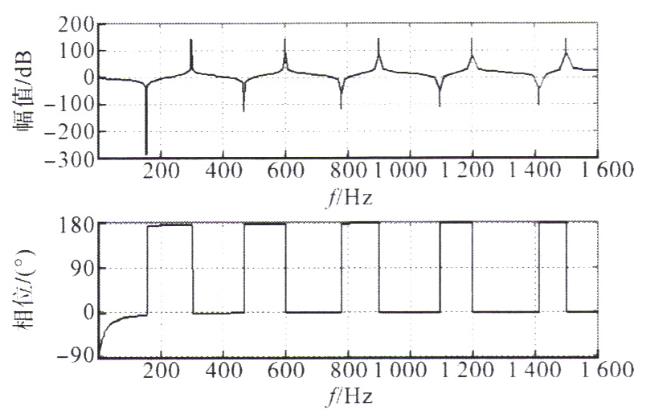
式中:Kp1、Kp1分別為PI控制的比例系數和積分系數;Kph、Kph分別為諧振控制的比例系數和諧振系數;h為諧波次數;ωg為基波角頻率。 由于dq變換,諧波分量變換在dq坐標系中為h=6n次諧波。因此,可以在dq坐標系中調諧加次諧波,達到調諧abc靜止坐標系中h=6n±1次諧波電流的目的。取Kp1=Kph=0.5, Ki1= Krh=50可得PI-VPI控制器的bode圖如圖7所示。
圖7 PI-VPI控制開環
由圖7知,在頻率6n的ωg諧波也即300、600、900、1200 Hz和1500 Hz處時,PI-VPI控制器諧振增益無窮大,從而保證了在該處及其邊頻帶處的諧波能夠得到有效的調諧,保證補償諧波零誤差跟蹤補償指令。 4 實驗研究
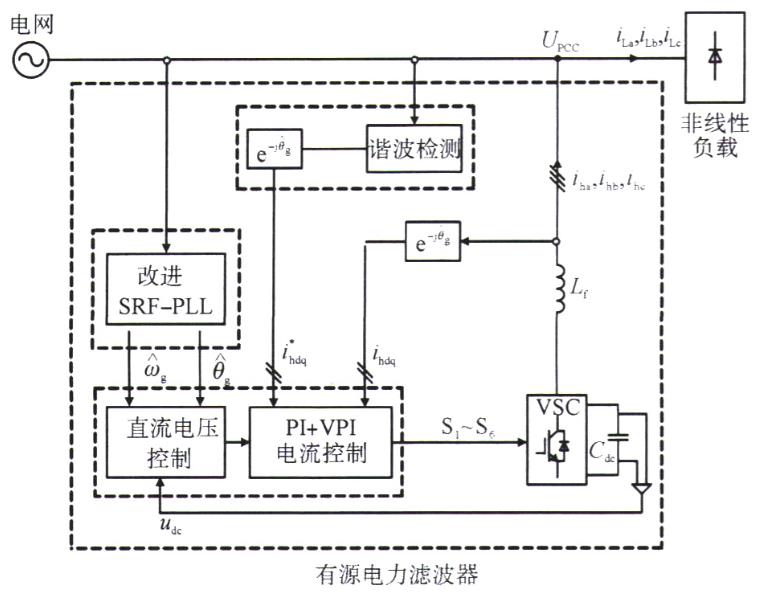
圖8為系統整體原理框圖,主要包括改進SRF-PLL鎖相、改進諧波檢測、直流母線電壓外環控制和H-VPI電流內環控制。
圖8 APF控制結構
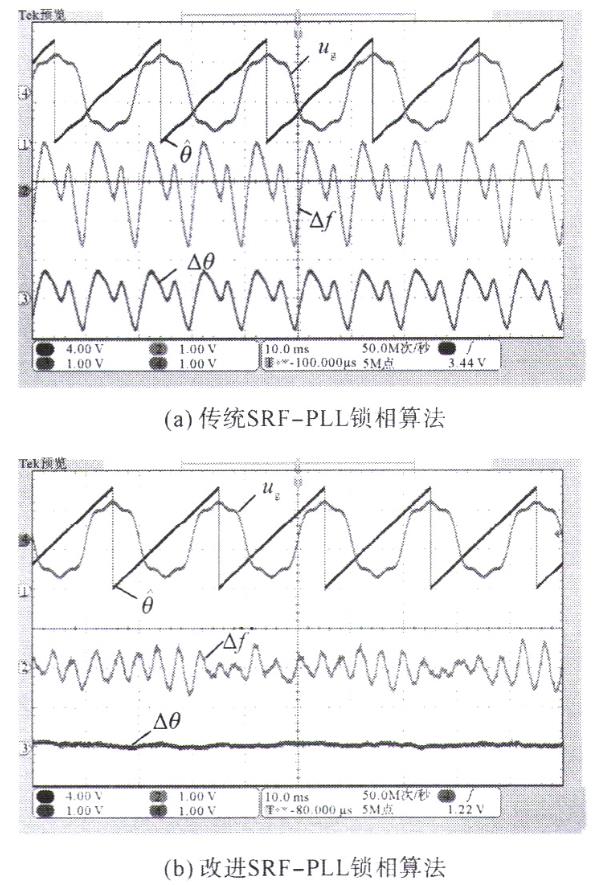
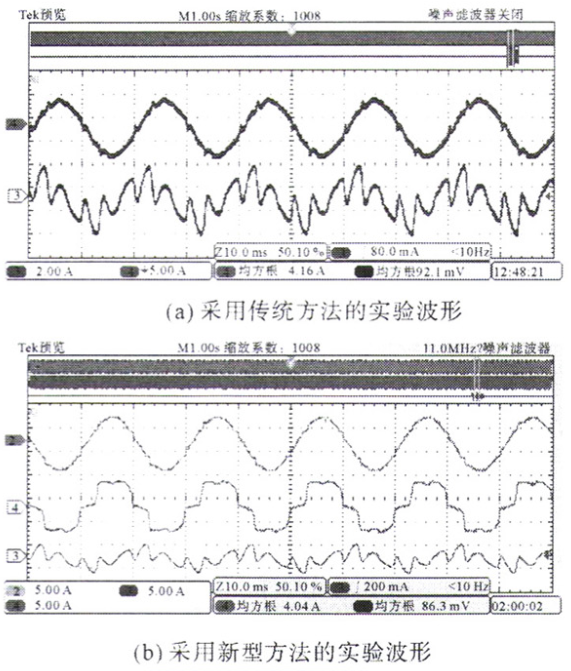
系統實驗樣機主要參數如下:電網電壓為380 V,電網頻率為50 Hz,帶整流型負載,直流電壓udc=900 V,實驗檢測方案對三相全橋整流負載所產生的abc靜止坐標系中的6n±1次諧波進行設計試驗波形如圖9-10所示。 由圖9可知,電網畸變時,傳統SRF-PLL鎖相 精度較差,誤差高達9°,改進的SRF-PLL具有很好 的檢測精度,鎖相誤差小于1°;圖10(a)為采用傳統 諧波檢測方法的實驗波形,自上而下分別為電網電 流波形和APF輸出電流波形。10(b)為采用新型諧波檢測方法的實驗波形,自上而下分別為電網電流波形、負載電流波形和APF輸出電流波形,可以看出,新型補償后,電流波形比較光滑,諧波補償效果好。
圖9 電網電壓畸變時SRF-PLL實驗波形
圖10 兩種控制算法下電流的變化曲線
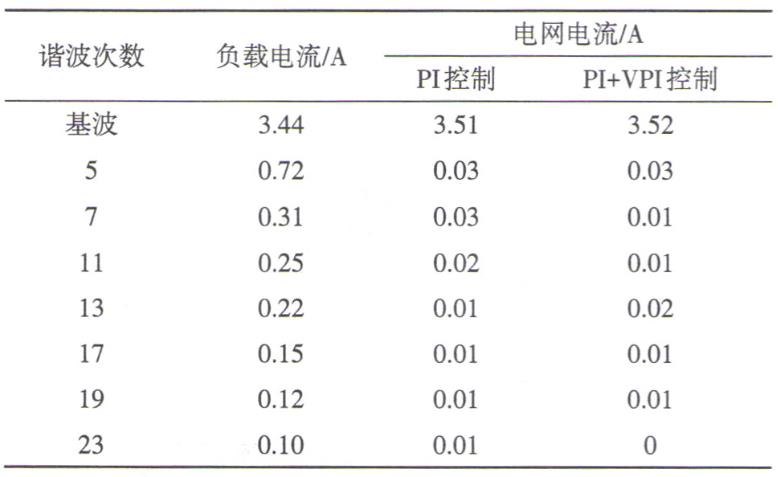
對a相負載電流、PI控制和H+VPI控制電網電流進行傅里葉分析的結果見表1,其中負載電流的THD為26.35%,PI控制電網電流的THD為5.24%,PI+VPI控制電網電流THD為4.16%,可見H+VPI控制具有較好的實時補償效果。 表1 負載電流、PI控制和PI+VPI控制電網電流傅里葉分析
5 結束語
本文提出一種新的有源電力濾波器的控制技術,主要由改進SRF-PLL鎖相技術、改進諧波檢測技術和PI-VPI電流控制策略組成。在電網畸變條件下,該控制策略能夠精準地檢測電網真實相位及其需要補償的諧波,而且PI+VPI控制器在6n倍基波頻率處諧振增益無窮大,保證了補償電流無靜差跟蹤指令電流。最后,通過實驗證明了在電網畸變條件下本文提出的方法優于其他方案,補償后的電網電流THD約為4.16%。 |